从虚拟到现实
假如你吃了鸡蛋觉得不错,何必认识那只下蛋的母鸡呢?我是一个想弄清楚下蛋过程的人。
获悉Mathias创办(co-found)了 DISDAR,真心希望他能做出改变世界的产品来。优秀的工作总是令人着迷,在第一次看了SIGGRAPH上的演示视频后,我就告诉自己,我要知道它的全部。大约两年之后,我才实现了 Mathias 论文里的算法流程,并开源了草图检索引擎OpenSSE。这是一个基础的框架,目前只对外提供了一种特征提取算法。希望草图检索不再神秘,更希望感兴趣的朋友能不断的改进,一起把它做成产品。
初因
大学期间,在看过一个精美的3D Demo 之后,我就开始学习OpenGL,选择了计算机图形学这条道路,走进了3D 虚拟世界。大学二年级的时候,被一个学长拉去做内网检索的项目,又了解了lucene和检索的相关知识。这两点都对我决定做草图检索起到了积极的影响。
框架
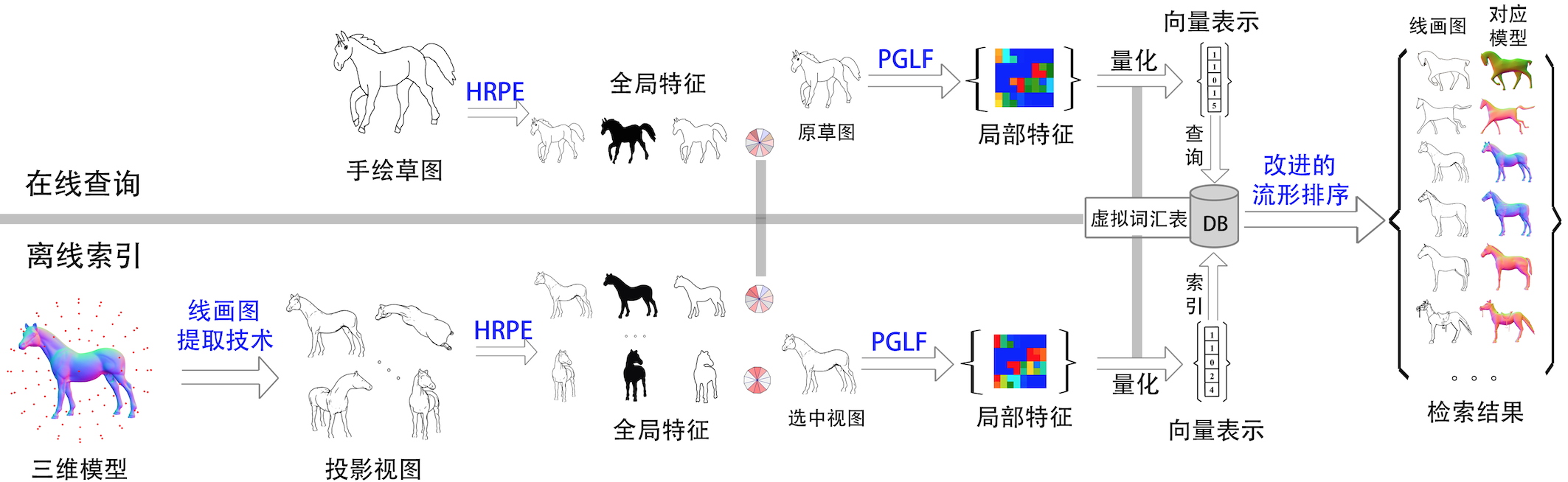
完整的草图检索引擎(更确切的说是OpenSSE)需要包含三个部分:草图获得,特征提取和排序算法。
草图获得
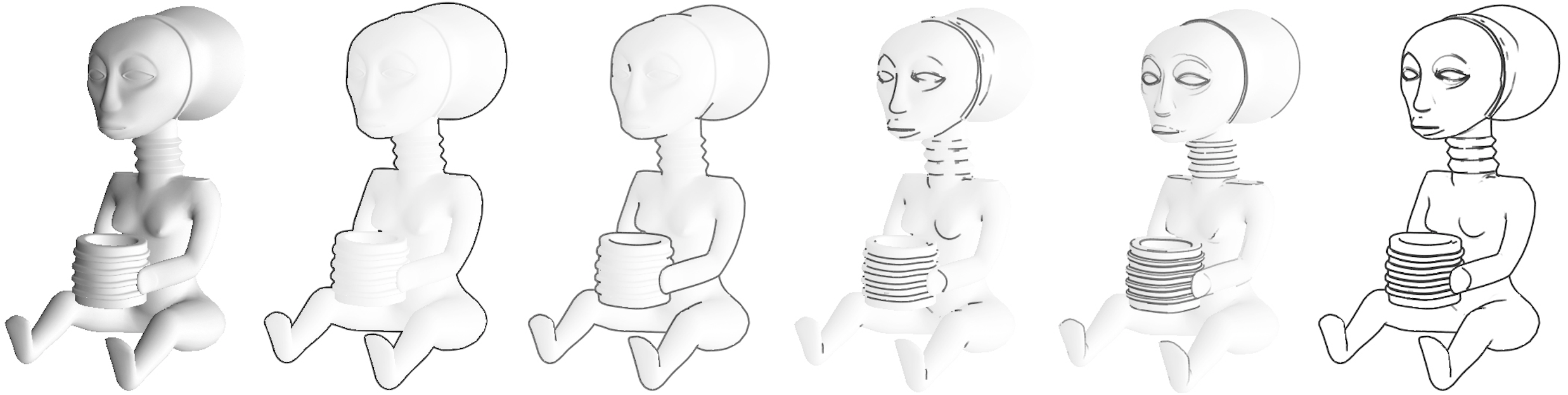
用于检索的草图主要来源于手绘和线画图提取。手绘的草图噪声大,不稳定,却是最真实的存在,在用识别类算法训练时,手绘草图具有先天优势。手绘草图收集困难,数量有限。更多的草图来源于三维模型,得益于Szymon Rusinkiewicz等人的奉献,我写了一个Qt版本的trianglemesh,并重新定义了线画图。
特征提取
最先研究的特征提取算法就是SIFT,那是最痛苦的时候。理解完之后,发表第一篇技术博客《SIFT算法详解》,希望帮助初学者跨越David论文里的鸿沟。结果收到了很多鼓励,直到现在为止,还时不时的会收到大家交流的邮件和赞助,真的非常感谢!
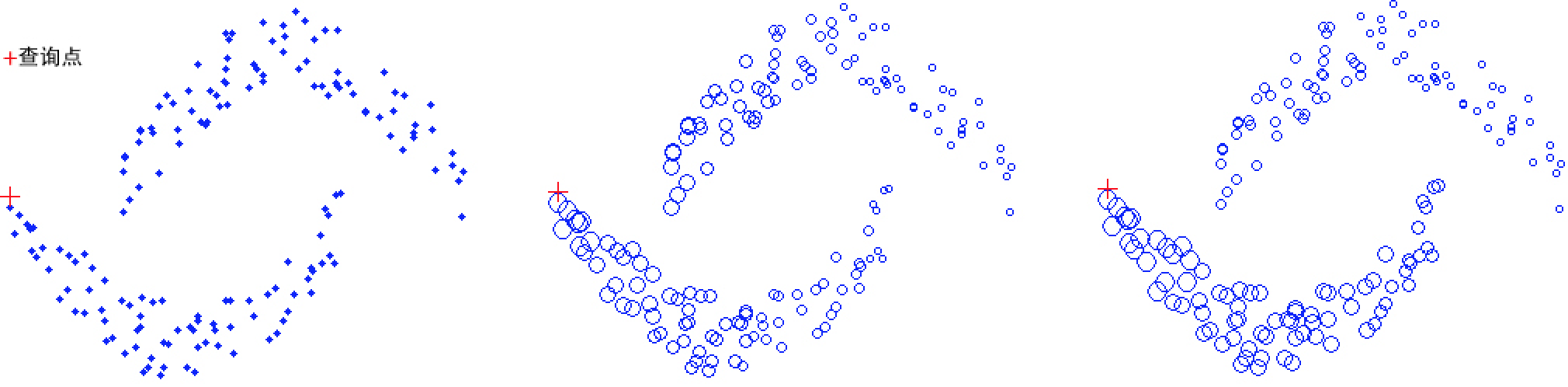
排序算法
开源的OpenSSE在排序时,使用了最简单的余弦定理,新的版本会使用流行排序算法。
当前工作
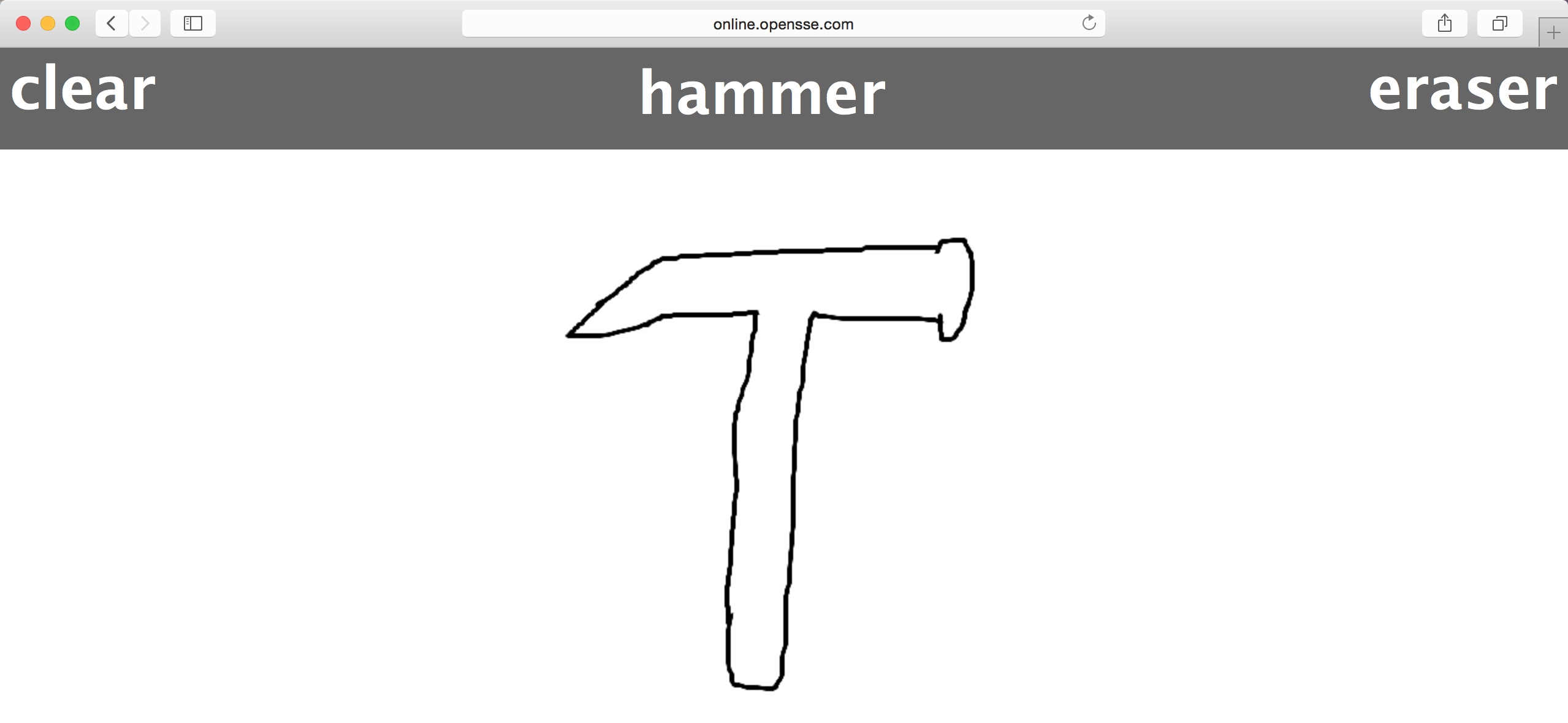
基于OpenSSE,实现了一个在线的草图识别版本。受训练草图的限制,在准确率和本土化上都打了折扣。打算实现一个在线的草图收集共享平台,希望得到web开发者的支援。
相机原理
在处理三维相关工作时,一直有一架相机,杵在我的键盘上,屏幕前。最近对实际相机起了兴趣,正好也有机会,从虚拟转向现实,可以好好研究一下摄像机。感觉又为自己挖了一个坑, 哈哈。
如果你喜欢这篇文章,欢迎赞赏作者以示鼓励

